By David Jen
Autonomous robot fleets could soon be carrying out dangerous jobs such as nuclear power plant inspections and offshore power infrastructure repairs.
A team of engineers — from the University of Glasgow, University of Manchester, Bristol Robotics Laboratory, and Heriot-Watt University — have taken the concept of robot swarming even further with symbiotic multirobot fleets, or SMuRFs.
While swarms of robots have typically used the same programming language and software-development kits to ease implementation, SMuRFs employ a cyber-physical system that, among other tasks, can perform translations between robots. The additional software layer allows various types of robots from different manufacturers to intermesh into a single heterogeneous fleet.
“(In a) symbiotic multirobot fleet, you may have a robot that’s good at one job (and) another robot that’s good at a different type of job,” says Daniel Mitchell, a Ph.D. student at the University of Glasgow who is researching SMuRF roles in nuclear power plants. “Maybe one has wheels, another one has legs, and there (are) benefits to both because in these types of facilities, we don’t see — and we don’t think that there’s going to be — a universal magic solution robot that can solve all problems.”
Mitchell and Paul Dominick Baniqued, Ph.D., a project manager for robotics company CRADLE, are the lead authors of “Lessons learned: Symbiotic autonomous robot ecosystem for nuclear environments,” a paper published in December in the Institution of Engineering and Technology journal Cyber-systems and Robotics. The paper details a 2022 SMuRF demonstration at the RAICo1 robotics hub in Cumbria, England.
The demonstration set forth the SMuRFs on a simulated nuclear facility inspection mission, similar to one that might occur during the post-operational cleanout phase of a nuclear power plant. The fleet consisted of a Boston Dynamics Spot quadruped robot, an Agile X Scout 2.0 unmanned ground vehicle and a Scout Mini UGV equipped with lidar sensors, a Clearpath Jackal UGV, a DJI Tello unmanned aerial vehicle, and a Franka Panda robotic manipulator arm.
“Nuclear facilities undergoing decommissioning present several challenges to robotics including unstructured, high-consequence environments with hazards, such as radiological, chemical, thermal and other risks, which are often not visible to the eye,” note the authors of the paper.
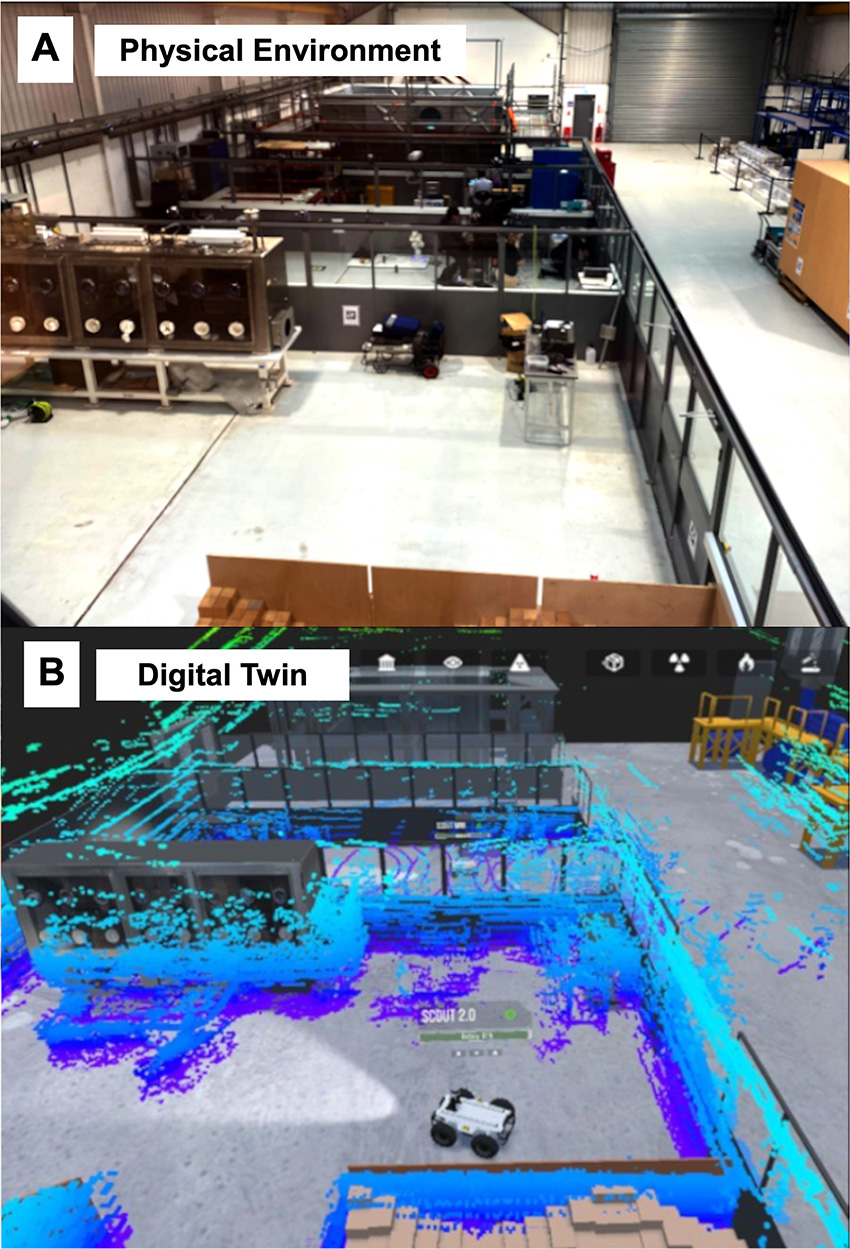
During the demonstration, the Scout 2.0 and Scout Mini equipped with lidar sensors entered the test space, creating a 3D map of the physical environment. Next, the DJI Tello UAV identified through its camera a simulated leak in a waste storage drum.
In response, the Clearpath Jackal UGV used its radar to classify the leak, and a manipulator arm was added to the Spot robot to pick up a gamma sensor and perform a vertical radiation scan of the drum. The series of steps involved a mix of autonomous and remotely operated robot actions.
In addition to high-risk tasks, such as the demonstration’s radioactive leak survey, robots in general also excel at dull and monotonous tasks. Scanning a large floor area for possible radioactive particles, says Mitchell, serves as a good example.
“For a human, that would be a job that someone could do because they can still wear rubber footwear that would protect them well enough. ... (But) it would take quite a long time, and a human eventually would kind of lose interest,” he says.
David Flynn, Ph.D., a professor in cyber physical systems at the University of Glasgow and a paper co-author, also envisions SMuRF applications outside nuclear power plants.
“In addition to work in the nuclear sector, there’s tremendous additional potential in sectors like offshore power generation, where SMuRFs could handle many routine inspection and repair tasks,” says Flynn in a Dec. 18 University of Glasgow press release, “SMuRFS could help make nuclear decommissioning work safer.”
“Currently, these tasks are expensive because they often require staff to be helicoptered out to offshore sites, a process which can be hampered by bad weather,” notes Flynn.
Digital twins
Along with inter-robot communications, the cyber-physical systems the researchers created also take advantage of up to 1,600 sensors within the fleet to form a near real-time digital twin of the SMuRF’s environment. This 3D map greatly enhances the fleet’s decision-making abilities, helping the human operators gain situational awareness if they need to take direct control of a robot, according to the press release.
Digital twin systems are already in use for infrastructure and in the automobile industry. Within the nuclear industry, however, Mitchell expects digital twins to first become more prevalent with human operators before autonomous robots are allowed into the mix. That type of access is a lot more difficult due to the defense-in-depth approach in place for nuclear power plants to ensure that there are multiple redundant layers of security, Mitchell says.
Mitchell’s team is also investigating how nuclear operators and roboticists interpret all the information fed to them by fleets. They have found that with larger fleets, the operator is more likely to experience cognitive overload, Mitchell says. The amount of data and the stress of responsibilities with large fleets play into operator difficulties.
A new heuristic study by the team explores different user interfaces, such as those afforded by virtual reality headsets that might alleviate such overloads.
David Jen is a freelance science journalist based in the San Francisco Bay Area.
This article is published by Civil Engineering Online. It appeared in the March/April 2024 print issue of Civil Engineering as “Dangerous Job? Send in the SMuRFs.”
