
By Kris Zacny, Ph.D, M.ASCE
To live on the moon, humans will need to excavate the lunar surface for oxygen, water, and other critical elements. Two new technologies recently sent to the moon have been tested to see how these resources can be mined.
The moon is the only non-terrestrial body that humans have visited. Some even consider it the eighth continent. After all, it is a relatively short distance from Earth, taking just a few days of travel to reach, albeit in a spaceship. And as astronaut Alan Shepard proved during the Apollo 14 mission in 1971, it is even possible to “play” golf there. The low gravity and lack of atmosphere on the moon helped him hit a ball that, he said, went for “miles and miles and miles.”
The moon has a terrestrial-like regolith that is versatile. It contains approximately 40% oxygen that can be used to sustain a human presence. Water, which can be found at the south and north poles of the moon, can serve as another source of oxygen, as well as hydrogen. Together, these elements can be used as rocket fuel, which means lunar explorers will not need to bring fuel with them for the return journey; they can refuel on the moon.

To make the moon a permanent destination for humans and establish not just a colony but thriving cities, civil and geotechnical engineers are developing innovative lunar excavation and construction technologies. Some of the techniques used to extract lunar resources can be adapted from the excavation and construction approaches and technologies used on Earth, which have been tested over time.
Traditional extraction
Previous excavation systems sent to the moon used traditional methods such as hammer drills and scoops with robotic arms. These mechanized systems tend to be large and heavy, requiring a significant amount of time to operate.
For instance, digging a hole on the moon with a scoop is a complex task. First the surface location must be determined, then a specific point chosen, and then digging must commence to collect the regolith. Next it must be confirmed that the scoop has collected the material, and then the material must be sent to an instrument to verify successful delivery. Each step usually involves a human in the loop and necessitates sending commands and images between the moon and the mission operations center on Earth.
Lunar regolith itself is difficult to work with. This is where terrestrial geotechnical and excavation engineers, who develop excavation systems, become useful. Lunar regolith is composed partly of rock that has been broken up over billions of years by the impact of asteroids and comets hitting the moon’s surface. The process is similar to terrestrial mining crushers that turn large rocks into rock powder. At least 50% of lunar regolith grains are smaller than 100 microns, and 90% are smaller than 1 mm. These particles are not only small but also very angular, making them highly abrasive when they come into contact with mechanical systems.
Lunar regolith particles are more than just crushed rock, however. About half of these particles are a combination of mineral grains, rock fragments, and agglutinates bonded together by glass. These particles form when micrometeoroids strike the lunar surface, creating heat and melting the soil, which then traps nearby grains as it cools into a glass-like substance.
Agglutinates are even more abrasive than rock fragments and can damage bearings, gears, and the seals of mechanical systems if left unprotected. For example, the space suits worn by Apollo astronauts experienced numerous issues due to lunar regolith.
Lunar landing
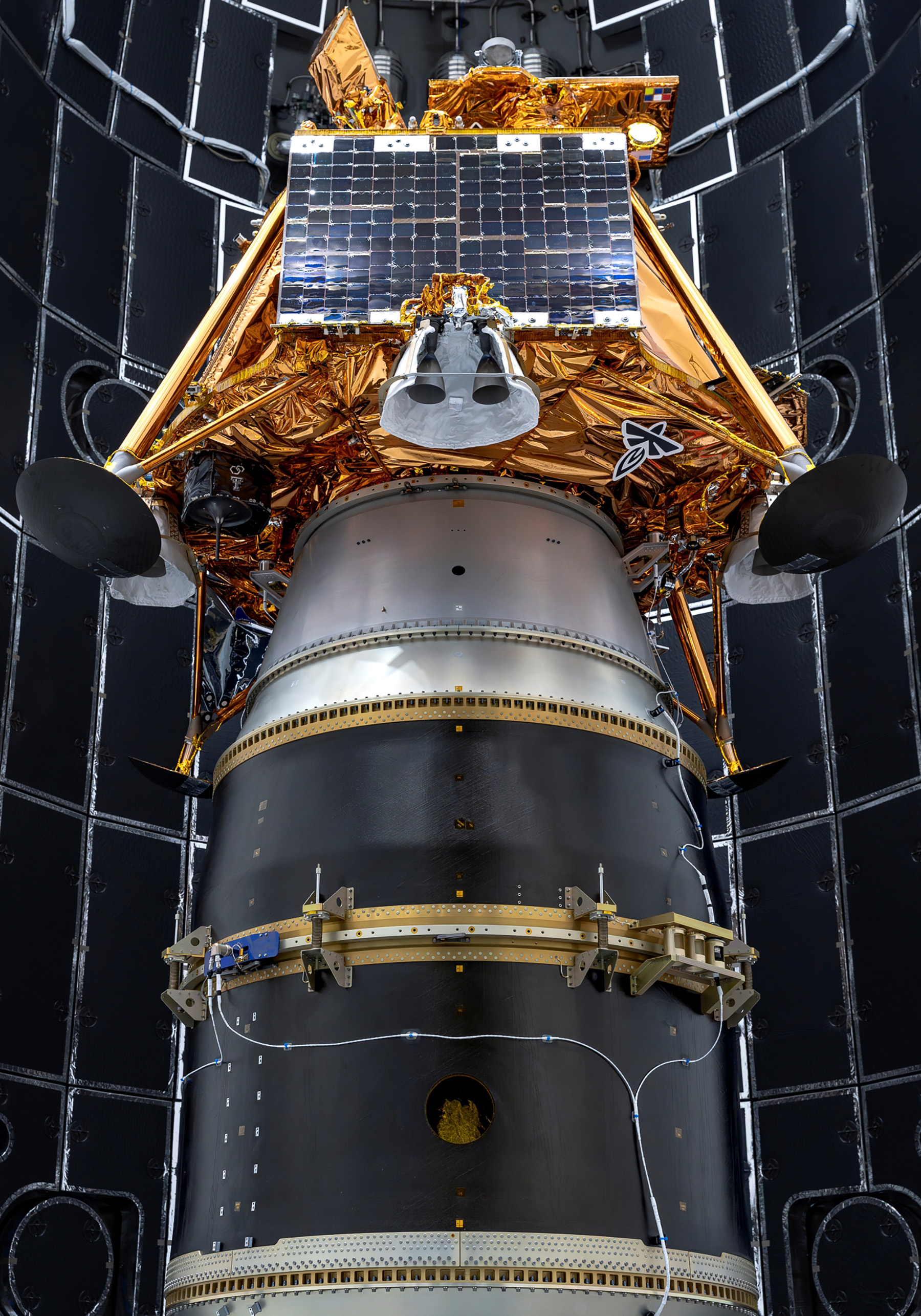
On Jan. 15, 2025, Firefly Aerospace, a space and defense technology company, launched its Blue Ghost Mission 1 lander from NASA’s Kennedy Space Center on Merritt Island, Florida, on a journey to the moon. The lander touched down at Mare Crisium on March 2. Mare Crisium is a basin located in the northeast quadrant of the moon’s near side (which always faces Earth). The uncrewed Blue Ghost became the first commercial spacecraft to successfully land on the lunar surface and remain in an upright position throughout the mission.
The spacecraft carried two innovative technologies developed by Honeybee Robotics, a Blue Origin company: PlanetVac and LISTER (Lunar Instrumentation for Subsurface Thermal Exploration with Rapidity). These advanced systems were deployed to assess their operational performance in the lunar environment and to collect valuable scientific data about the moon’s mineralogical and thermal properties.
Lunar vacuum
PlanetVac — developed in collaboration with NASA and The Planetary Society, a nonprofit space organization — is a groundbreaking sample collection system that employs pneumatic technology to gather surface materials. Unlike traditional mechanical drilling or scooping devices, PlanetVac operates on a straightforward principle: It uses gas pressure to collect regolith samples. It is essentially a lunar vacuum cleaner, but since the moon lacks air, the gas used to gather the regolith is stored in a small tank.

The system works by releasing a burst of compressed gas downward onto the surface, creating a localized tornado-like disturbance that suspends particles in the gas stream. This particle-rich gas is then redirected upward into a collection chamber where the sample is captured and retained.
The entire process takes just seconds, making it highly efficient compared with traditional sampling methods, which can take minutes or hours of mechanical operation. The efficiency is realized when the pressurized gas is released in the lunar vacuum, generating explosive-like forces with no outside air pressure to slow it down.
PlanetVac offers several more significant advantages over other excavation methods. First, it applies minimal force when making contact with surfaces, making it suitable for sampling on very low-gravity bodies, such as the moon. Second, the system has no exposed moving parts that could become clogged with abrasive lunar dust or fail in extreme temperatures, which range from –400 to 250 degrees F. Third, it can be used repeatedly in one location or moved with a robotic arm to gather samples from different sites.
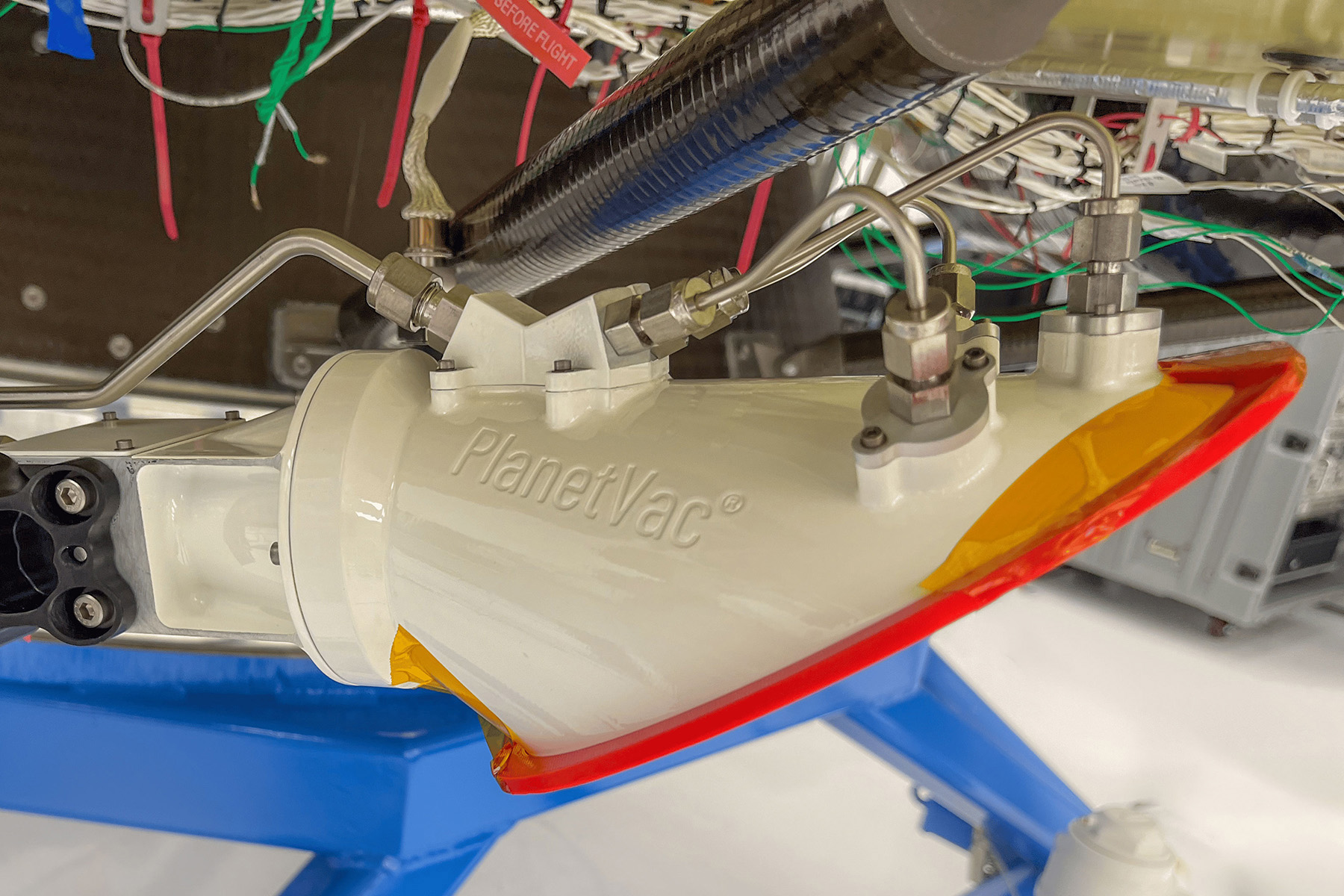
The PlanetVac device on the Blue Ghost 1 mission was deployed toward the surface by a short boom called the sample access arm. But because of the local uneven topography at the landing site — on a crater rim — the system never actually touched the lunar surface. This posed a major test for the technology, but it was a challenge the system handled well, collecting the regolith samples, including pebbles, in seconds.
Excavating regolith without physically touching it is something that alternative excavation methods, such as a scoop or a drill, could never accomplish.
The next step for the PlanetVac system is to excavate regolith from Phobos, one of Mars’ moons. A PlanetVac system is scheduled to fly to the Red Planet this year on Mars Moons eXploration, a Japanese spacecraft designed to land on Phobos and return Martian material to Earth by 2031.
Drilling down
Developed in collaboration with Texas Tech University, LISTER is a lunar heat flow probe designed to measure the moon’s subsurface thermal properties.
To meet this goal, LISTER had to penetrate the lunar subsurface without generating heat, which ruled out the use of mechanical drilling systems that cut rocks and regolith with a drill bit. Instead, LISTER uses high-pressure gas to mobilize and lift regolith from a hole, similar to air drilling on Earth.
In addition, to advance deeper below the ground, LISTER uses a 0.25 in. diameter coiled tubing technology borrowed from the oil and gas industry — another example of how a technology developed on Earth can be successfully adapted and used on the lunar surface. In this system, a high-pressure gas flows from a gas tank through the coiled tubing down toward the nozzle, which advances into the subsurface at a rate of one centimeter per second. During the Blue Ghost mission, the LISTER device reached a depth of 1 m, making it one of the deepest holes drilled on the moon by a robotic system.
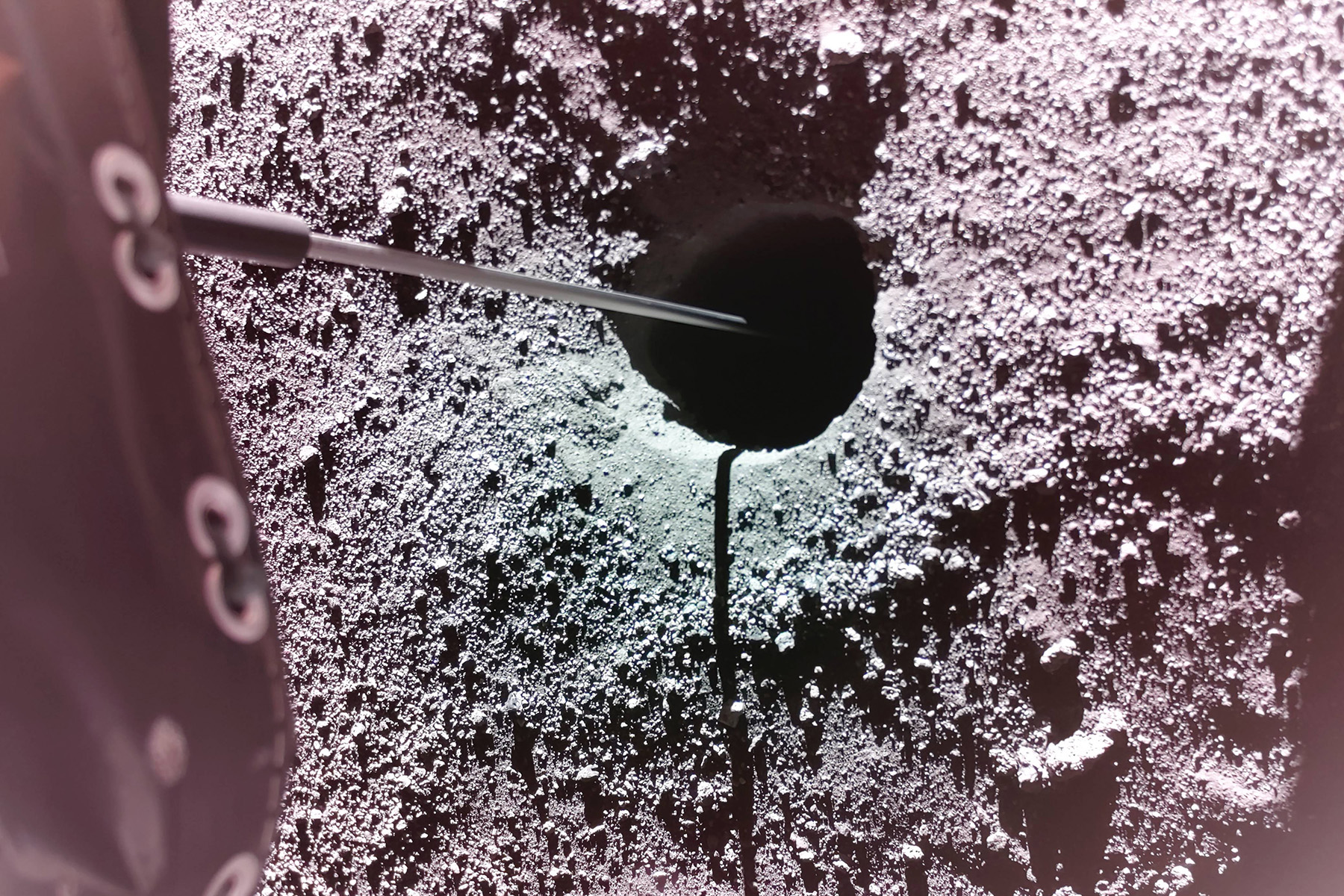
By comparison, the Soviet Union’s Luna 24 in 1976 achieved a depth of 2 m, while China’s Chang’e 5 and Chang’e 6, in 2020 and 2024, respectively, each reached depths of roughly 1 m. The Soviet and Chinese probes used hammer drills to penetrate the regolith. By successfully drilling into the lunar surface, LISTER demonstrated that a smaller (shoebox-sized), lighter (10 kg), and low-powered (roughly 50 watts) drilling system can accomplish the same work that previously was achieved by heavier (50 kg), taller (more than 3 m), and more power-hungry (500 watt) hammer drill systems.
A second LISTER system is scheduled to fly to the moon in 2027 with a lander co-developed by Draper Labs. The destination will be the Schrödinger basin, formed by impact from a smaller body.
This expedition will be another exciting mission and the first from the United States to land on the side of the moon not seen from Earth.
Honeybee Robotics is also developing a larger LISTER system with 1 in. diameter coiled tubing and a mechanical drill bit at the end, capable of drilling into regolith to depths of 10 m or more.
Increasing the tube diameter from 0.25 in. to 1 in. will enable a stiffer drill pipe that can apply greater force with the drill bit. This mission will search for water and other valuable volatiles that will help sustain humans on the moon.
Operating the PlanetVac and LISTER systems on the moon has been a dream come true for everyone involved in developing these technologies over the past decade. Honeybee’s greatest revelation has been that the lunar surface is full of surprises, making the experience even more thrilling.
When we gaze up at the moon in the night sky, it’s no longer just a celestial body. It holds profound significance for us, knowing that our work is on its surface, advancing lunar exploration.
The author will discuss the topics from this article in two presentations — PlanetVac on the Moon: Successful Demonstration of Pneumatic Regolith Mining, Transport, and Sorting and Successful Demonstration of Pneumatic Drilling on the Moon using the Lunar Instrumentation for Subsurface Thermal Exploration with Rapidity (LISTER) — during ASCE’s Earth and Space 2026 conference. The conference is scheduled for April 13-16, 2026, at Texas A&M University in College Station, Texas.
Kris Zacny, Ph.D., M.ASCE, is the vice president of exploration systems at Honeybee Robotics, a Blue Origin company in Altadena, California.
This article first appeared in the March/April 2026 issue of Civil Engineering as “Unlocking Lunar Resources.”
